
Welcome to the Precision Mechatronics Lab at the University of Newcastle
Conferences

IEEE International Conference On Mechatronics – Loughborough, UK, March 15-17, 2023
IEEE International Conference On Mechatronics - Loughborough, UK, March 15-17, 2023. IEEE International Conference on Mechatronics 2023 (IEEE ICM 2023) continues a series of biennial conferences dedicated to recent and prospective developments in various fields [...]

Micromechatronic Systems at IFAC World Congress, 2020
Join us for the open track sessions on Modeling, Identification, Estimation and Control in Micromechatronic Systems, at IFAC World Congress 2020, in Berlin, Germany. Organizers: Prof Helon Vicente Hultmann Ayala, Pontifical Catholic University of Rio [...]
News

Soft Robotic Manta Rays
PhD student Matheus Xavier introduces his research on soft robotic manta rays for low-impact exploration in sensitive underwater environments. Watch the video. https://youtu.be/BAN7ZxoomYo

Dr Michael Ruppert elected as Fresh Scientist for 2021
Doctor Michael Ruppert has been announced as one of the 2021 Fresh Scientists. This program is run by Science in Public and aims to upskill Early Career Researchers into science communicators. Michael is an Early Career [...]
Matheus Xavier Wins School Heat of the 3 Minute Thesis
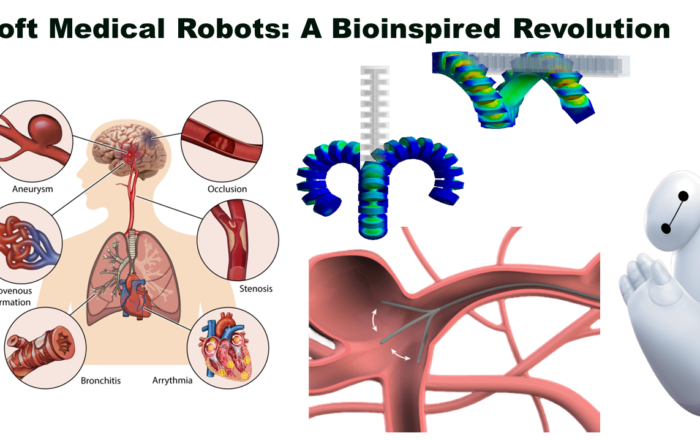
Matheus from the Precision Mechatronics Lab wins the school heat at the University of Newcastle of the 2021 3 Minute Thesis Competition. With his talk titled "Soft Medical Robots: A Bioinspired Revolution" - Matheus [...]
Seminars
Linlin Li: Tracking control of the scanner for high-speed scanning of the AFM
Date & Venue Tuesday, 04 February 2020, 04:00pm EF122 Abstract The Atomic Force Microscope (AFM) has emerged as an indispensable research tool in the development of nanoscience and nanotechnology. Piezoelectrically actuated nanopositioning stages are widely [...]
Daniel Martin Jimenez: Atomic Force Microscopy: From Liquid to Ultra-high Vacuum Environments
Date & Venue Monday, 10 February 2020, 10:00am EF122 AbstractThe atomic force microscope (AFM) is a versatile tool that can operate in contact or dynamic mode on metallic, semiconductor, insulator or biological samples in liquid, [...]
Harm Schepens: Ultrasonic Orthopaedic Implant Release
Date & Venue Wednesday, 11 December 2019, 02:00pm EF122 Abstract In order to recover from fractures suffered in the limbs, intramedullary (IM) rods are inserted into the bone marrow canal. When in place, the IM [...]
Publications
A three-DOF compliant micromotion stage with flexure hinges Journal Article
In: Industrial Robot, vol. 31, no. 4, pp. 355-361, 2004.
Spatial Control of Vibration: Theory and Experiments Book
World Scientific, 2003, ISBN: 981-238-337-9.
Loop closure theory in deriving linear and simple kinematic model for a 3 DOF parallel micromanipulator Proceedings Article
In: Proc. SPIE on Device and Process Technologies for MEMS, Microelectronics, and Photonics III, Perth, Australia, pp. 57-66, 2003.
Spatial system identification of a simply supported beam and a trapezoidal cantilever plate Proceedings Article
In: Proc. IEEE Conference on Decision and Control, Las Vegas, NV, 2003.
Active H₂ and H[subscript infinity] shunt control of electromagnetic transducers Proceedings Article
In: Proc. IEEE Conference on Decision and Control, Maui, HI, 2003.