
Pneumatic Soft Robotics Driver: PneuSoRD
Accepted IROS 2021 Paper: https://www.precisionmechatronicslab.com/wp-content/uploads/2021/09/PneuSoRD_Paper_Submission.pdf
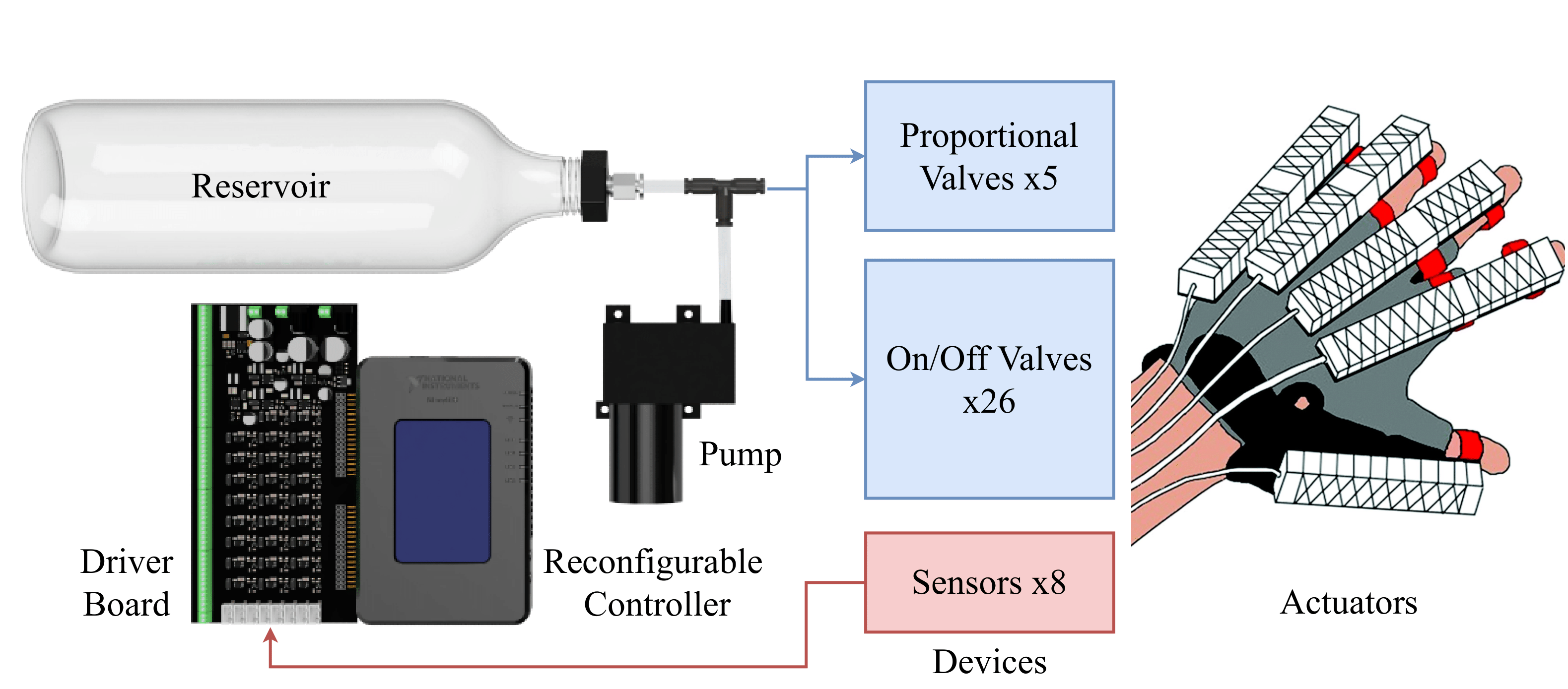
The Pneumatic Soft Robotics Driver (PneuSoRD) is an open-source power electronics device for controlling pneumatic soft robots with a large number of actuators. This system is designed around the two major categories of valve types: 1) on-off valves with single or multiple solenoids, which require a binary input, and 2) proportional valves, which require a variable DC voltage. The PneuSoRD design includes circuit channels for both of these options. Each circuit channel is designed to suit the widest possible range of valve options. Each circuit channel can be driven by either: a myRIO 1950 embedded controller with LabVIEW, or an Arduino Due with Simulink. Both LabVIEW and Simulink allow real-time tuning of control parameters signal visualisation. Control algorithms can also be implemented in Arduino code, as described in the Soft Robotics Toolkit.
For more information on the design, schematics or to purchase a PneuSoRD board or contact the author, please visit https://github.com/PrecisionMechatronicsLab/PneuSoRD; taylor.young@newcastle.edu.au
A link to the paper can be found here
PneuSoRD is available to be purchased through PayPal