Welcome to the Precision Mechatronics Lab at the University of Newcastle
Conferences


A/Prof Andrzej Sikora’s visit to PML
As part of the Marie Skłodowska-Curie Actions (MSCA) ENSIGN project, we were pleased to host A/Prof Andrzej Sikora from Wrocław University of Science and Technology, Poland. A leading expert in [...]
Fabricating Microneedles Using Pulsating Electrohydrodynamic Force
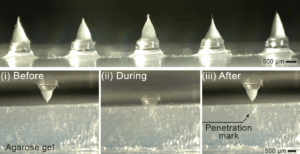
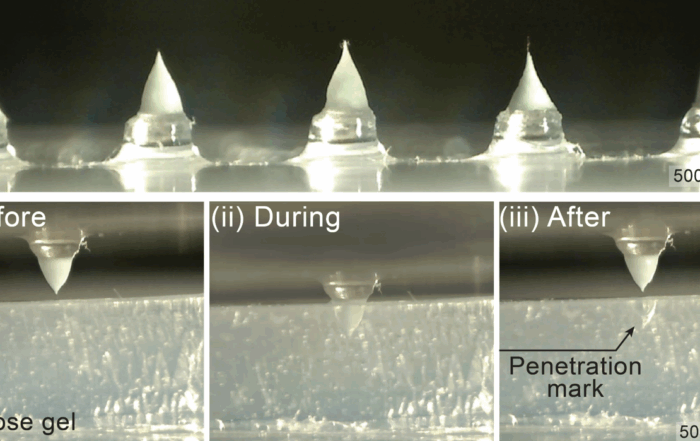
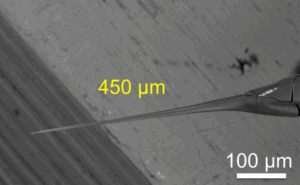
Associate Professor Yuen Yong and her research team at Griffith University have introduced an innovative method known as PIDES—pulsating in situ dried electro stretching—for fabricating microneedles. The method produces needles [...]
News
Fabricating Microneedles Using Pulsating Electrohydrodynamic Force
Associate Professor Yuen Yong and her research team at Griffith University have introduced an innovative [...]
Paszkal’s Visit to Newcastle
It has been a fun 3 months working and learning from Paszkal on CFD modelling [...]

IEEE International Conference On Mechatronics – Loughborough, UK, March 15-17, 2023
IEEE International Conference On Mechatronics - Loughborough, UK, March 15-17, 2023. IEEE International Conference on [...]

Soft Robotic Manta Rays
PhD student Matheus Xavier introduces his research on soft robotic manta rays for low-impact exploration [...]
Seminars
Fabricating Microneedles Using Pulsating Electrohydrodynamic Force
Associate Professor Yuen Yong and her research team at Griffith University have introduced an innovative method known as PIDES—pulsating in [...]
Paszkal’s Visit to Newcastle
It has been a fun 3 months working and learning from Paszkal on CFD modelling using OpenFoam. We had also [...]
IEEE International Conference On Mechatronics – Loughborough, UK, March 15-17, 2023
IEEE International Conference On Mechatronics - Loughborough, UK, March 15-17, 2023. IEEE International Conference on Mechatronics 2023 (IEEE ICM 2023) [...]
Soft Robotic Manta Rays
PhD student Matheus Xavier introduces his research on soft robotic manta rays for low-impact exploration in sensitive underwater environments. Watch [...]

The Precision Mechatronics Lab develops new devices and processes for imaging and fabrication. This includes new sensors, actuators and control systems for applications in microscopy, mask-less lithography, and biomedical imaging.

The Precision Mechatronics Lab is supported by the Australian Research Council, Industrial Partners, The Center for Complex Dynamics Systems and Control (CDSC), and the University of Newcastle.

The University of Newcastle is ranked in the top 3% of world universities and #26 for a university under 50 years old. We are a research intensive university with a world-wide reputation for research in Engineering, the Sciences, and Medicine.
Recent Publications
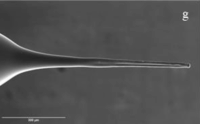
Electrohydrodynamic Fabrication of Silica Microtips for SERS-Based Microscale pH Sensing Conference
International Conference on Nanoscience and Nanotechnology, 2026.
Free-templated Microfabrication of Hydrogel Microneedles Using Electrohydrodynamic Technique for Transdermal Drug Delivery Conference
The 29th International Conference on Miniaturized Systems for Chemistry and Life Sciences - Micro-Total Analysis Systems (uTas), Adelaide, 2 - 6 November, 2025, 2025.
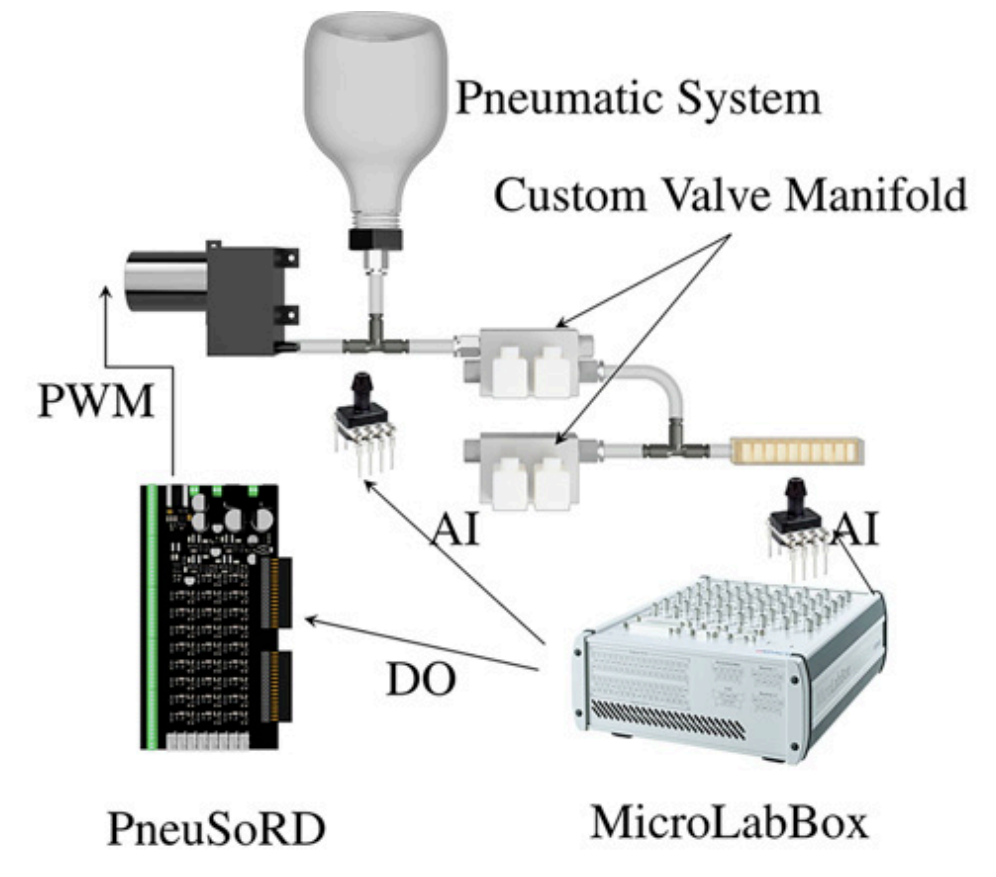
Multivalve Configuration for Soft Robotics: Overcoming the Trade-Off Between Speed and Accuracy in Pneumatic Systems Journal Article
In: Robotics Reports, vol. 3, no. 1, pp. 54-64, 2025, ISSN: 2835-0111.
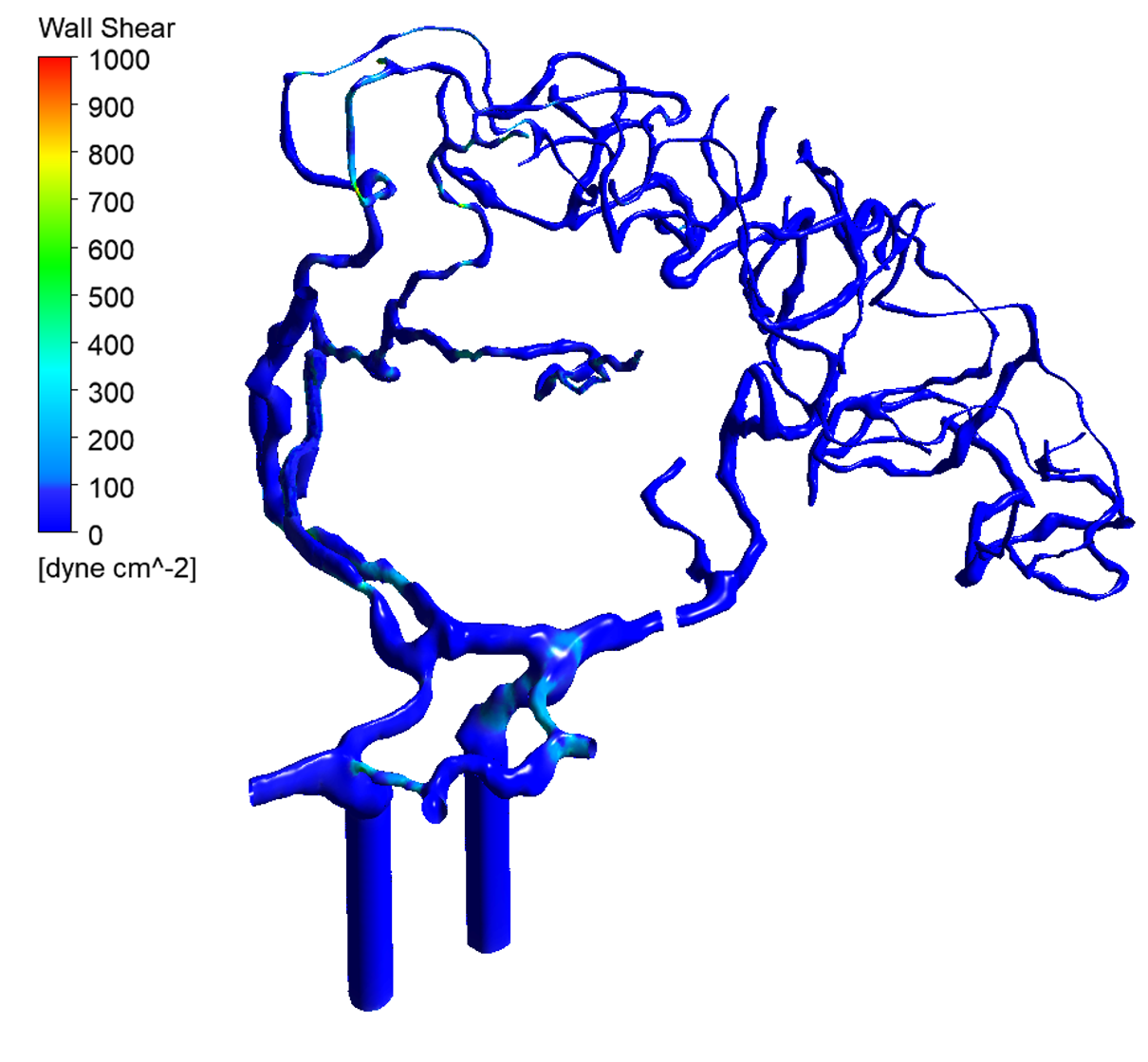
Shear Stress Targeted Delivery of Nitroglycerin to Brain Collaterals Improves Ischaemic Stroke Outcome Journal Article
In: Advanced Science, vol. e06276, 2025.
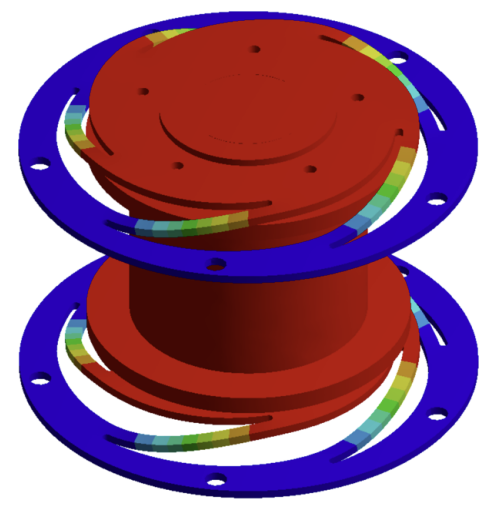
Electromagnetic Objective Lens Scanner: Design, Modeling and Characterization Best Paper Proceedings Article
In: International Conference on Manipulation, Automation and Robotics at Small Scales, West Lafayette, IN, USA, 2025, ISBN: 979-8-3315-9687-3, (Best Conference Paper Award).
Pulsated in-Situ Dried Electrostretching Fabrication of Microneedles for Transdermal Drug Delivery Proceedings
23rd International Conference on Solid-State Sensors, Actuators and Microsystems (Transducers), 2025.