
Scanning Probe Microscopy
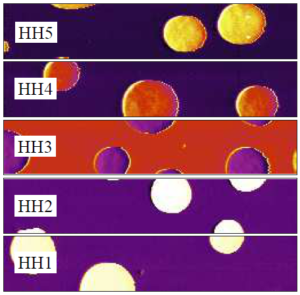
Probe Based Lithography
Probe based lithography involves creating nanometer sized features from photoresist and metal on conducting and semiconducting substrates. Near field optical, electrical and thermal fields are employed in combination with evaporation, etching and electroplating to provide high-speed alternatives for mask-less nanofabrication.

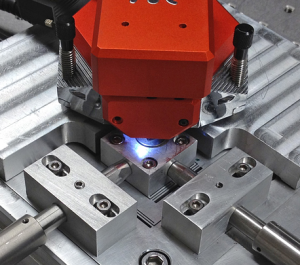
Nanopositioning
A nanopositioner is a electromechanical device for moving objects in three dimensions with atomic, or sub-atomic resolution. Nanopositioners are employed in applications such as imaging, fabrication and optics. This field encompasses mechanical design, sensor design, and control theory. More details.
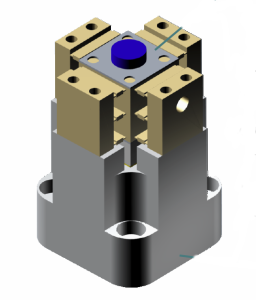
Electroactive Optics
Piezoelectric actuators can be combined with mirrors, lenses and objectives to actively control the path and properties of an optical field or laser beam. High speed electro-optics are required for precision lasers, maskless lithography, and microscopy.
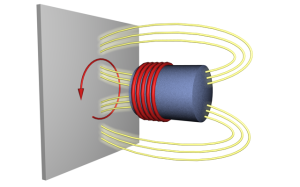
Precision Sensors
This project aims to study the fundamental limitations of capacitive, optical and magnetic position sensors. New techniques are under development to provide sub-atomic resolution over extremely wide bandwidth.
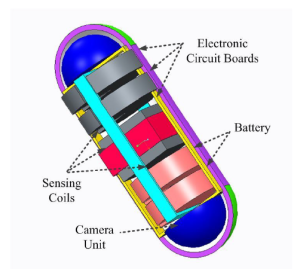
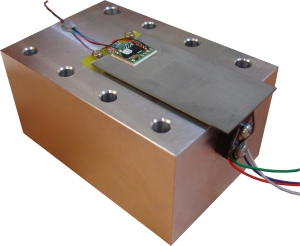
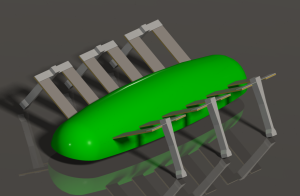
Biomedical Devices
An endoscopic pill robot is being developed for noninvasive imaging and intervention. The robot can be swallowed and includes power transmission, 6-Dimensional localization, and locomotion.
Piezo Actuators and Amplifiers
Piezo bender actuator with integrated 200V power electronics
Piezo Robotics
Due to their compact size and high efficiency, piezoelectric actuators are ideal for micro-actuation in bio-inspired robotics. This project is developing actuators and mechanics for a piezoelectric dragon-fly robot.
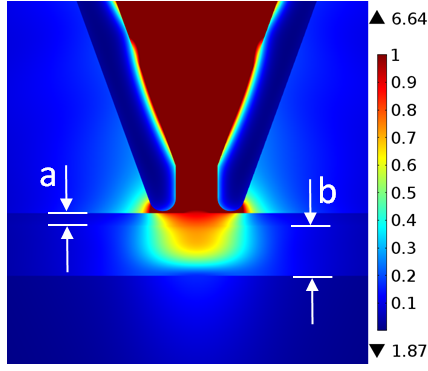
Optimization of near-field scanning optical lithography Proceedings Article
In: Proc. SPIE Advanced Lithography, San Jose, CA, 2015.
Design, Modeling and Control of Nanopositioning Systems Book
Springer, London, UK, 2014, ISBN: 978-3319066165.
Measuring and predicting resolution in nanopositioning systems Journal Article
In: Mechatronics, vol. 24, no. 8, pp. 605-618, 2014.
An Analytical approach to integral resonant control of second-order systems Journal Article
In: IEEE/ASME Transactions on Mechatronics, vol. 19, no. 2, pp. 651–659, 2014.
Optimal Integral Force Feedback and Structured PI Tracking Control: Application for High Speed Confocal Microscopy Journal Article
In: Mechatronics, vol. 24, no. 6, pp. 701-711, 2014.
