Fabricating Microneedles Using Pulsating Electrohydrodynamic Force
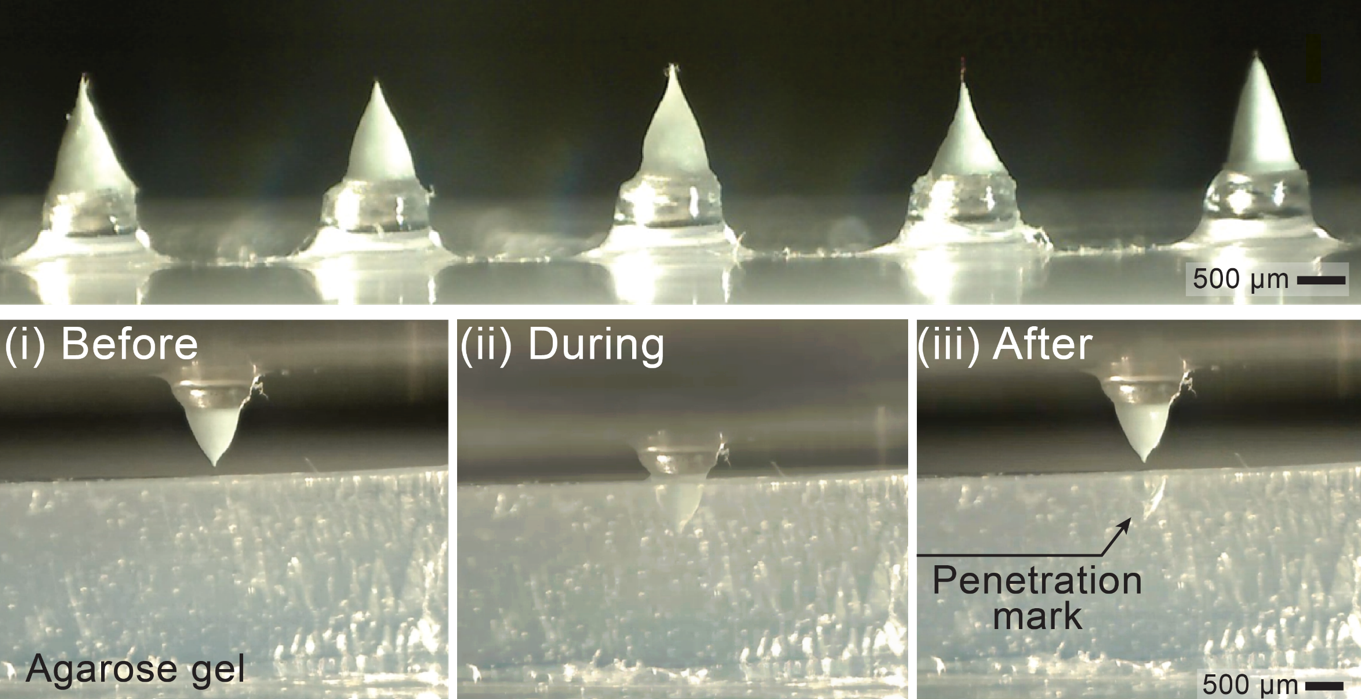
Associate Professor Yuen Yong and her research team at Griffith University have introduced an innovative method known as PIDES—pulsating in situ dried electro stretching—for fabricating microneedles. The method produces needles under 1 mm in length, specifically designed to painlessly penetrate the skin’s outer layer and facilitate effective drug delivery. Existing fabrication methods such as micro [...]