
Contact Details:

Yik R. Teo (Barry)
Precision Mechatronics Lab
School of Electrical Engineering and Computer Science
The University of Newcastle
Callaghan, NSW 2308, Australia
+61 2 4921 7463
Yik(dot)Teo(at)newcastle.edu.au
Biography
Yik R. Teo graduated from The University Of Newcastle, Australia (Callaghan campus) with a Bachelors of Electrical Engineering (Honours Class 1) in 2008 and Masters of Philosophy in Mechanical Engineering in 2013. He is presently a Ph.D candidate at the Precision Mechatronics Lab located in the School of Electrical Engineering and Computer Science, The University of Newcastle. His research includes energy-based control, high-precision positioning, scanning probe microscopy, and nanofabrication.
Awards
- Vice Chancellor Award for Outstanding Research Candidate, 2013
- Australian Postgraduate Award, 2013
- Glenn and Ken Moss Scholarship, 2012
- University of Newcastle International Postgraduate Research Scholarship, 2011
Education
The University of Newcastle, Callaghan Campus
Master of Philosophy (Mechanical Engineering)
Thesis title: Energy-based control for a class of under-actuated mechanical system
Supervisors: Prof. Tristan Perez and Dr Alejandro Donaire
The University of Newcastle, Callaghan Campus
Bachelor of Engineering (Electrical Engineering) with Honours Class 1
Thesis title: Vertical feedback control for a scanning probe microscope
Supervisor: A/Prof Andrew J Fleming
INTI International College, Penang
Diploma in Electrical and Electronics Engineering
Teaching Experience
The University of Newcastle, Callaghan Campus
MCHA2000 Mechatronics System
2015 Lecturer
2012 Lab Demonstrator
2011 Lab Demonstrator
GENG1803 Introduction to Engineering Practice
2015 Tutor
Conferences Attended
- Australian Control Conference November 10-11, 2011, Melbourne, Australia
- 51st IEEE Conference on Decision and Control (CDC) December 10-13, 2012, Grand Wailea, Maui, Hawaii, USA (Oral Presentation)
- 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), July 9-12, 2013, Wollongong, Australia (Oral Presentation)
- IEEE Sensors 2013, November 4-6, 2013, Baltimore, Maryland, USA (Poster Presentation)
- American Control Conference 2014, June 4-6, Portland, Oregon, USA (Oral Presentation)
- Actuator 2014, International Conference and Exhibition on New Actuators and Drive Systems, June 23-25 2014, Bremen, Germany
- 19th World Congress of the International Federation of Automatic Control, August 24-29, 2014, Cape Town, South Africa (Oral Presentation)
- 2015 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), July 7-11, 2014, Busan, Korea
- 54th IEEE Conference on Decision and Control (CDC) December 15-18, 2015, Osaka, Japan
- 2015 IEEE Multi-Conference on Systems and Control (MSC) September 21-23, Sydney, Australia (Best Student Paper Finalist)
- American Control Conference 2016, July 6-8, Boston, MA, USA (Oral Presentation)
- MARSS International Conference on Manipulation, Automation and Robotics at Small Scales, July 18-22, Paris, France (Oral Presentation)
Publications
2018
A Comparison Of Scanning Methods And The Vertical Control Implications For Scanning Probe Microscopy Journal Article
In: Asian Journal of Control, vol. 30, no. 4, pp. 1-15, 2018.
Improving Robustness Filter Bandwidth in Repetitive Control by Considering Model Mismatch Journal Article
In: Asian Journal of Control, vol. 20, no. 3, pp. 1-11, 2018, ISSN: 1934-6093.
2016
A Simplified Method For Discrete-Time Repetitive Control Using Model-Less FIR Filter Inversion Journal Article
In: Journal of Dynamic Systems, Measurement and Control, vol. 138, no. 8, pp. 081002, 2016.

A Review of Scanning Methods and Control Implications for Scanning Probe Microscopy (Invited Paper) Proceedings Article
In: American Control Conference, Boston, MA, 2016., Boston, MA, 2016.
2015
Low-order Damping and Tracking Control for Scanning Probe Systems Journal Article
In: Frontiers in Mechanical Engineering, vol. 1, pp. 1-9, 2015.
Model-less FIR Repetitive Control with consideration of uncertainty Proceedings Article
In: IEEE Multiconference on Systems and Control, Sydney, 2015.
Optimal integral force feedback for active vibration control Journal Article
In: Journal of Sound and Vibration, vol. 356, no. 11, pp. 20-33, 2015.
2014

Optimal Integral Force Feedback and Structured PI Tracking Control: Application for High Speed Confocal Microscopy Journal Article
In: Mechatronics, vol. 24, no. 6, pp. 701-711, 2014.
Optimal Integral Force Feedback and Structured PI Tracking Control: Application for High Speed Confocal Microscopy Proceedings Article
In: Proc. IFAC World Congress, Cape Town, South Africa, 2014.
Discrete-time repetitive control with model-less FIR filter inversion for high performance nanopositioning Proceedings Article
In: Proc. IEEE/ASME Advanced Intelligent Mechatronics, Besançon, France, 2014.
Active Damping Control Using Optimal Integral Force Feedback Proceedings Article
In: Proc. American Control Conference, Portland, Oregon, 2014.
A New Repetitive Control Scheme Based on Non-Causal FIR Filters Proceedings Article
In: Proc. American Control Conference, Portland, Oregon, 2014.
2013
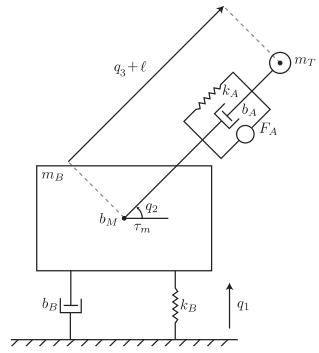
Regulation and integral control of an underactuated robotic system using IDA-PBC with dynamic extension Proceedings Article
In: 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), 2013.
Resolution of Sensors with Capacitive Source Impedance Proceedings Article
In: Proc. IEEE Sensors, Baltimore, MA, 2013.
2012
Total energy shaping of a class of underactuated Port-Hamiltonian Systems using a new set of closed-loop potential shape variables. Proceedings Article
In: 2012 IEEE 51st Annual Conference on Decision and Control (CDC), 2012.
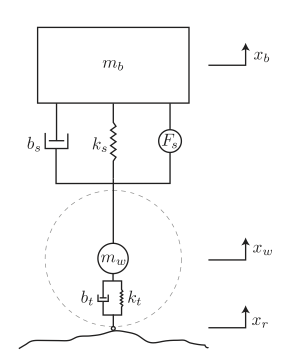
Active control of car suspension systems using IDA-PBC Proceedings Article
In: 2012 2nd Australian Control Conference (AUCC), 2012.
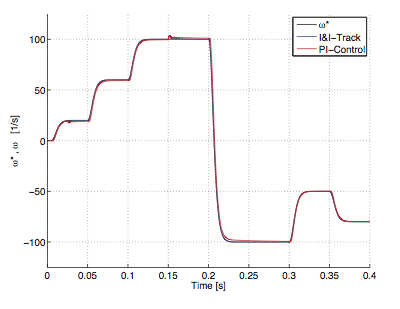
Robust speed tracking control of synchronous motors using immersion and invariance Proceedings Article
In: 7th IEEE Conference on Industrial Electronics and Applications (ICIEA 2012), 2012.